

NRI: INT: COLLAB: Muscle Ultrasound Sensing for Intuitive Control of Robotic Leg Prostheses
Tommaso Lenzi (PI), University of Utah, and Nicholas Fey (PI), University of Texas at Dallas
Award ID # 1925371 and 1925343
Problem Statement
Robotic prostheses can mimic virtually any motor behavior exhibited by the healthy limb. However, achieving this goal depends on the ability of the control system to coordinate with the user’s neuromuscular system. For proper adaptation of the robotic leg to the user and environment, the control signal should precede the movement. Neural signals generated by the user’s neuromuscular system precede movement and can, therefore, provide information on the user’s movement intention as necessary for a volitional control strategy. Electromyography (EMG) provided by the residual limb has been shown to benefit the control of robotic leg prostheses. However, its performance is negatively affected by the poor signal to noise ratio, the lack of specificity to individual deep-seated muscles, and poor reliability over an extended period.
Solution Statement
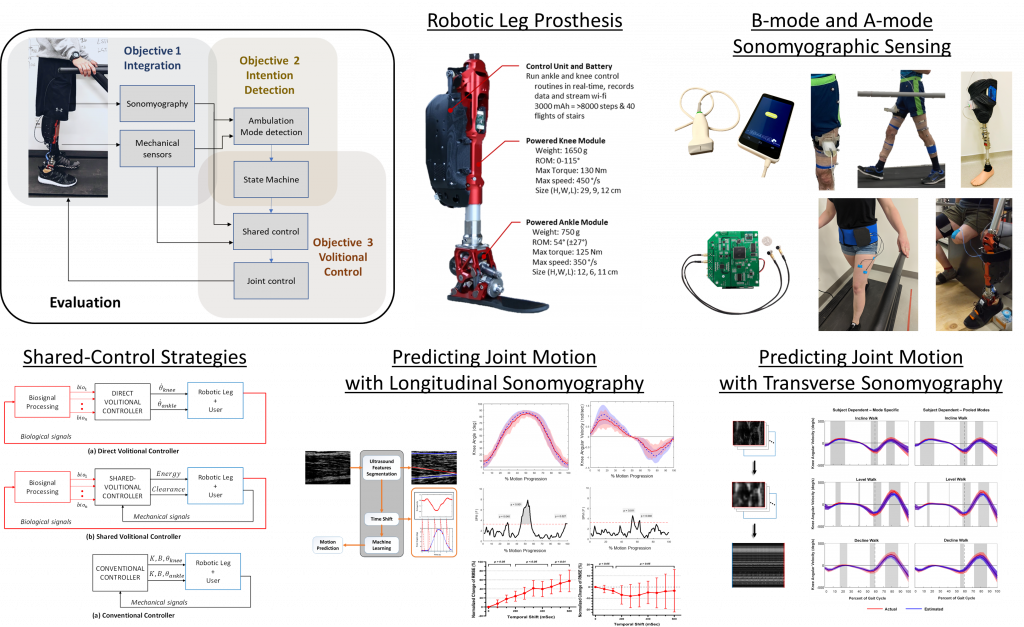
This proposal aims to improve the coordination between a robotic let prosthesis and the user’s neuromuscular system by integrating a novel sensing technique, namely sonomyography, and shared robot control.
- Sonomyography can provide rich information on the user’s movement intention through depth-resolved imaging of specific muscles and functional muscle compartments.
- Shared control has the potential to integrate the user’s volition into the robotic leg control system, while guarantying the levels of robustness and intuitiveness necessary for ambulation.
Central Hypothesis
By integrating sonomyography with shared control, robotic leg prostheses can achieve volitional behavior thus leading to unprecedented ubiquitous ambulation performance in complex, uncertain real-world environments compared to conventional reactive control strategies that rely on mechanical sensors alone.