

Composite Hip Exo (aka Hope)

The Composite Hip Exo uses a novel transmission system combining composite springs and non-linear kinematics to achieve high efficiency over wide ranges of torque and speed. The actuation and sensing are fully enclosed in a strong, lightweight carbon-fiber shell, which also acts as the frame of the exoskeleton. The carbon fiber shell is only 30mm thick and connects to the user through a soft, 3-d printed interface for comfort and adaptability. Check out our preliminary tests here and here.
Variable Transmission Knee (aka Juliet)
![]()
The Variable Transmission Knee uses a novel transmission system that adapts the motor torque and speed to the demand of different ambulation tasks. For example, the transmission ratio is high for tasks that require high torque and low speed, such as standing up from a seated position, and low for tasks that require high speed and low torque, such as swinging the leg forward in walking. This innovation enables the Variable Transmission Knee to be lighter, stronger, and more efficient than available powered knee prostheses. Check out the videos here and here. Read the article from PC magazine here and the scientific publication here.
Powered Polycentric Ankle (aka Romeo)

The powered polycentric ankle uses a novel polycentric design that combines structural and power transmission function in the same mechanism to achieve high-power capabilities and ultra-low weight. By producing up to 130 Nm of torque and weighing only 800g, the powered polycentric ankle matches the torque capability of the human ankle joint during ambulation while being much lighter. You can find more info and videos here and download the scientific publication here.
Ergo Knee Exo (aka Sasha)

The Ergo Knee Exo is a research knee exoskeleton designed to study ergonomics and human-robot interaction. Its design features one actuated joint, to assist/resist the knee flexion-extension, and four passive joints, to automatically and passively align the powered joint axis to the anatomical knee joint axis. Different from most powered exoskeletons, the Ergo Knee Exo has a symmetrical design: its mechanical structure wraps around the leg, rather than being positioned laterally, to avoid torsion on the wearer’s leg. The Ergo Knee Exo was designed by a team of undergraduate engineering students. Check out a video here.
Open Leg Bionics
The goal of this project is to make powered prostheses more accessible. To accomplish this goal, we developed a powered knee prosthesis from readily available mechatronic components and using only simple machining tools. We believe that sharing the technical drawings and design instructions of our powered knee prosthesis will help anyone interested in the field to contribute to our long-term goal of making powered prostheses more accessible, to advance the research being done, and to promote STEM education. For this reason, we made our design open-source. Check out a video here.
COMPLETED PROJECTS
Hybrid Knee

We developed a novel hybrid actuation system for robotic knee prosthesis that combines a conventional passive spring/damper system with an innovative variable transmission based on slider-crank design. The Hybrid Knee can work in passive mode, to achieve quiet standing and walking, and, in active mode, to helping subjects stand up from a sited position and ambulate on stairs. You can read more here and download the scientific publication here.
Adaptive Positioning Ankle
The Adaptive Positioning ankle uses a novel non-backdrivable actuation system based on a cam design resulting in an ultra-low profile–50mm built height–that would have been impossible to obtain with conventional transmission systems. Its control system adapts to the ground inclinations and actively increases foot clearance in swing phase, making ambulation safer and more comfortable for transtibial amputees. You can read more here and download the scientific publication here.
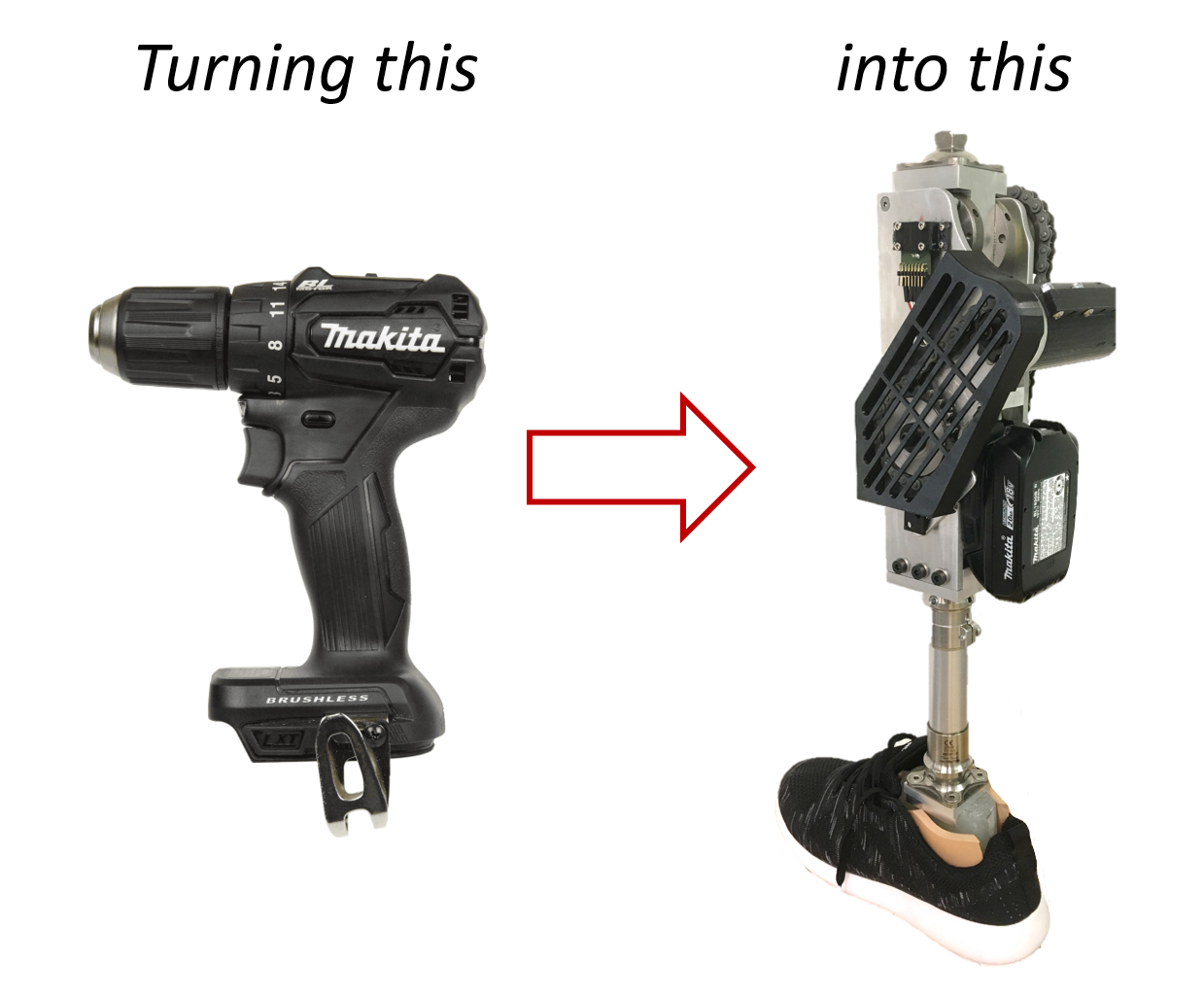
Robotic Retrofit Prosthesis
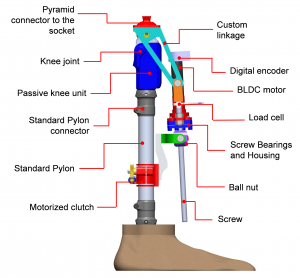
We designed a robotic system that can transform a conventional passive prosthesis into a powered robotic leg, thus allowing transfemoral amputees to perform activities that would not have been possible with their prescribed passive prostheses, such as climbing stairs. The Robotic Retrofit Prosthesis comprises two main functional elements: (1) a powertrain, which includes the motor and the primary transmission system, and (2) a motorized clutch that engages the motor and the primary transmission system during activities that require positive power such as standing up from a seated position or climbing stairs. Read More.