


October 29, 2020, Las Vegas, NV, USA
Welcome!
Robotic powered prostheses have recently evolved from devices tethered to a power supply and a desktop computer to self-contained devices with onboard electronics and batteries. Powered prosthetic devices are now able to assist during walking, ambulation on stairs and ramps, and sit-stand transitions. However, there are significant challenges that the field needs to address for powered prostheses to fully realize their potential. In order to better understand and discuss these challenges, we present a collection of invited talks from world-renown scientists and video demonstrations of some of the most advanced robotic powered prostheses in the world.
leave your comments and questions at the end of the page!
Invited Contributions
Michael Goldfarb, PhD

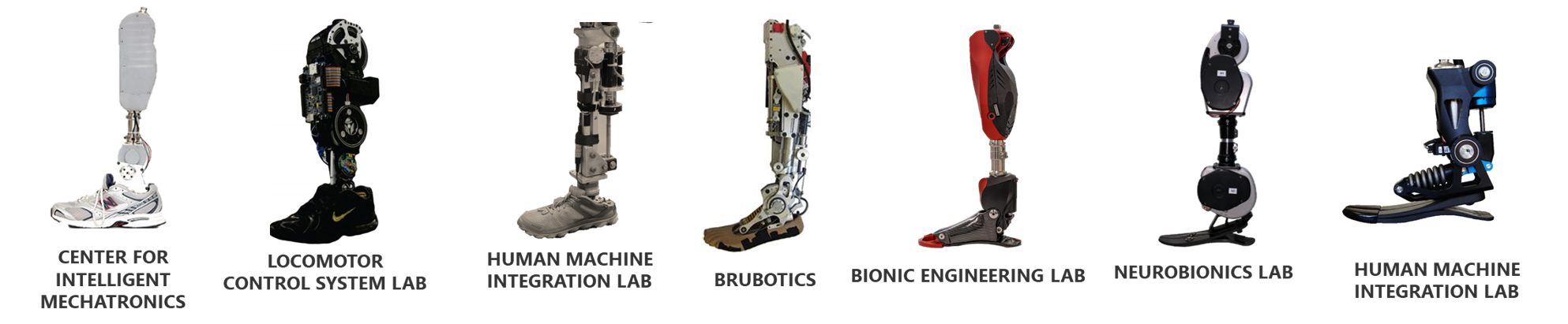
Dr. Goldfarb directs the Center for Intelligent Mechatronics, which specializes in the development and assessment of robotic technology to improve the quality of life and/or quality of care for people with physical disabilities. The Center’s research includes the development and assessment of robotic lower limb prostheses that offer improved gait biomechanics across a wide range of activities to transtibial and transfemoral amputees; the development and assessment of multigrasp hand prostheses that offer enhanced dexterity to upper extremity amputees; the development and assessment of lower limb exoskeletons to provide legged mobility to individuals with paraplegia; and the development of lower limb exoskeletons as a therapeutic intervention to provide overground gait retraining for individuals with lower limb hemiparesis following stroke.
Invited Talk
Robotic Leg Demonstration
Robert D. Gregg, IV, PhD
Associate Professor and Associate Director of Robotics Electrical Engineering and Computer Science, Robotics Institute University of Michigan
Dr. Gregg received the B.S. degree (2006) in electrical engineering and computer sciences from the University of California, Berkeley and the M.S. (2007) and Ph.D. (2010) degrees in electrical and computer engineering from the University of Illinois at Urbana-Champaign. He joined the University of Michigan as an Associate Professor in the Department of Electrical Engineering and Computer Science and the Robotics Institute in Fall 2019, and he became the Associate Director of Robotics for Graduate Education in Fall 2020. Prior to joining U-M, De. Gregg was an Assistant Professor in the Departments of Bioengineering and Mechanical Engineering at the University of Texas at Dallas. I was also a Research Scientist at the Rehabilitation Institute of Chicago and a Postdoctoral Fellow at Northwestern University. I am the Director of the Locomotor Control Systems Laboratory, which conducts research on the control mechanisms of bipedal locomotion with applications to wearable and autonomous robots
Invited Talk
Robotic Leg Demonstration
Helen (HE) Huang, PhD
Jackson Family Distinguished Professor Director of the Closed-Loop Engineering for Advanced Rehabilitation (CLEAR) Core North Carolina State University and University of North Carolina, Chapel Hill
Dr. Huang directs the Neuromuscular Rehabilitation Engineering Laboratory. Her research interest lies in science and technology that can establish and enhance a symbiotic relationship between humans and wearable assitive machines in order to augment motor function for individuals with disabilities. Her research goal is to create breakthroughs in human-machine symbiotic (HMS) systems that empower disabled people to lead more active and productive lives. To achieve this overarching goal, her current research focuses on understanding how limb amputees and robotic prostheses interact with each other and their environments and development of advanced control for robotic prostheses, which are adaptive, efficient, and safe, in order to restore the motor function in individuals with limb amputations.
Invited Talk
Dirk Lefeber, PhD
Professor
Dirk Lefeber is a professor in Mechanical Engineering and Head of the Robotics and Multibody Mechanics research group at VUB and brubotics.eu. He specializes in new actuators with adaptable compliance, dynamically balanced robots, robot assistants, rehabilitation robotics, and multibody dynamics. He has been involved in several EU and national projects, including most recently exo4work for the development of exoskeletons for manufacturing industry, and CyberlegsPlusPlus for the development of active knee-ankle prostheses.
Invited Talk
Robotic leg demonstration
Tommaso Lenzi, PhD
Assistant Professor and Core Faculty Department of Mechanical Engineering, Utah Robotics Center University of Utah
Tommaso Lenzi received a Ph.D. degree in BioRobotics from Scuola Superiore Sant’Anna in 2013. He is currently an Assistant Professor in the Department of Mechanical Engineering at the University of Utah, and a Core Faculty in the Utah Robotics Center. Previously, he was Research Scientist at the Rehabilitation Institute of Chicago (2015-2016), and a Postdoctoral Fellow at Northwestern University (2013-2014). Dr. Lenzi has co-authored more than 50 peer-reviewed scientific publications and more than 10 patents. He serves as Associate Editor for IEEE Robotics and Automation Letters, the International Conferences on Rehabilitation Robotics (ICORR), and Biomedical Robotics and Biomechatronics (BIOROB). At Utah, he directs the Bionic Engineering Laboratory, which focuses on the intersection of Robotics, Design, Control, and Biomechanics.
Invited Talk
Robotic Leg Demonstration
Elliott Rouse, PhD
Assistant Professor and Core Faculty Mechanical Engineering Department and Robotics Center University of Michigan
Dr. Rouse he directs the Neurobionics Lab. The vision of his group is to discover the fundamental science that underlies human joint dynamics during locomotion and incorporate these discoveries in a new class of wearable robotic technologies. The Lab uses technical tools from mechanical and biomedical engineering applied to the complex challenges of human augmentation, physical medicine, rehabilitation and neuroscience. Dr. Rouse and his research have been featured at TED, on the Discovery Channel, CNN, National Public Radio, Wired Magazine UK, Business Insider, and Odyssey Magazine. Dr. Rouse is a member of the IEEE Robotics and Automation Society and the IEEE Engineering in Medicine and Biology Society, as well as the American Society of Mechanical Engineers. He is a member of the IEEE EMBS Technical Committee on Biorobotics, and is on the Editorial Board of RESNA’s Assistive Technology journal. He is dedicated to effective student mentoring and training, as well as translating his research to the public through entrepreneurship; he holds patents for the design and control of wearable robotic systems.
Invited Talk
Robotic Leg Demonstration
Thomas Sugar, PhD
Associate Dean, Professor The Honors College at ASU Polytechnic Arizona State University and
and
Kevin Hollander, PhD
Dr. Sugar directs the Human Machine Integration Lab. Dr. Thomas Sugar works in the areas of wearable robotics for rehabilitation and gait assistance. In industry, he worked as a project engineer for W. L. Gore and Associates earning a Professional Engineering License. He has been a faculty member in the Department of Mechanical and Aerospace Engineering and The Polytechnic School at Arizona State University. He majored in business and mechanical engineering for his Bachelor’s degrees and mechanical engineering for his Doctoral degree all from the University of Pennsylvania. Dr. Sugar leads a research effort in wearable robotic systems. He is developing robotic orthoses and prostheses for rehabilitation and enhanced mobility. His current research projects include SPARKy, Spring Ankle with Regenerative Kinetics, a powered prosthetic ankle, PAFO, a powered ankle foot orthosis, and wearable exoskeletons for enhanced gait performance. Dr. Sugar also has co-founded companies. The Wearable Robotics Association will host a wearable robotics conference, WearRAcon, in Phoenix on an annual basis.